> WORKS > BLITZ > BLITZの製作過程
BLITZの製作過程
4足歩行ロボットBLITZの製作日記です。画像をクリックすると拡大されます。
| いきなりいくつかの工程を飛ばしていますが、まずはブラケットから作りました。このコの字のパーツを8個作りました。 |
 |
| ブラケットが完成したら足の先端のパーツを作成。3mm厚のアルミ板を使ったせいで、かなり重くなり加工性も悪くなってしまいました。 |
 |
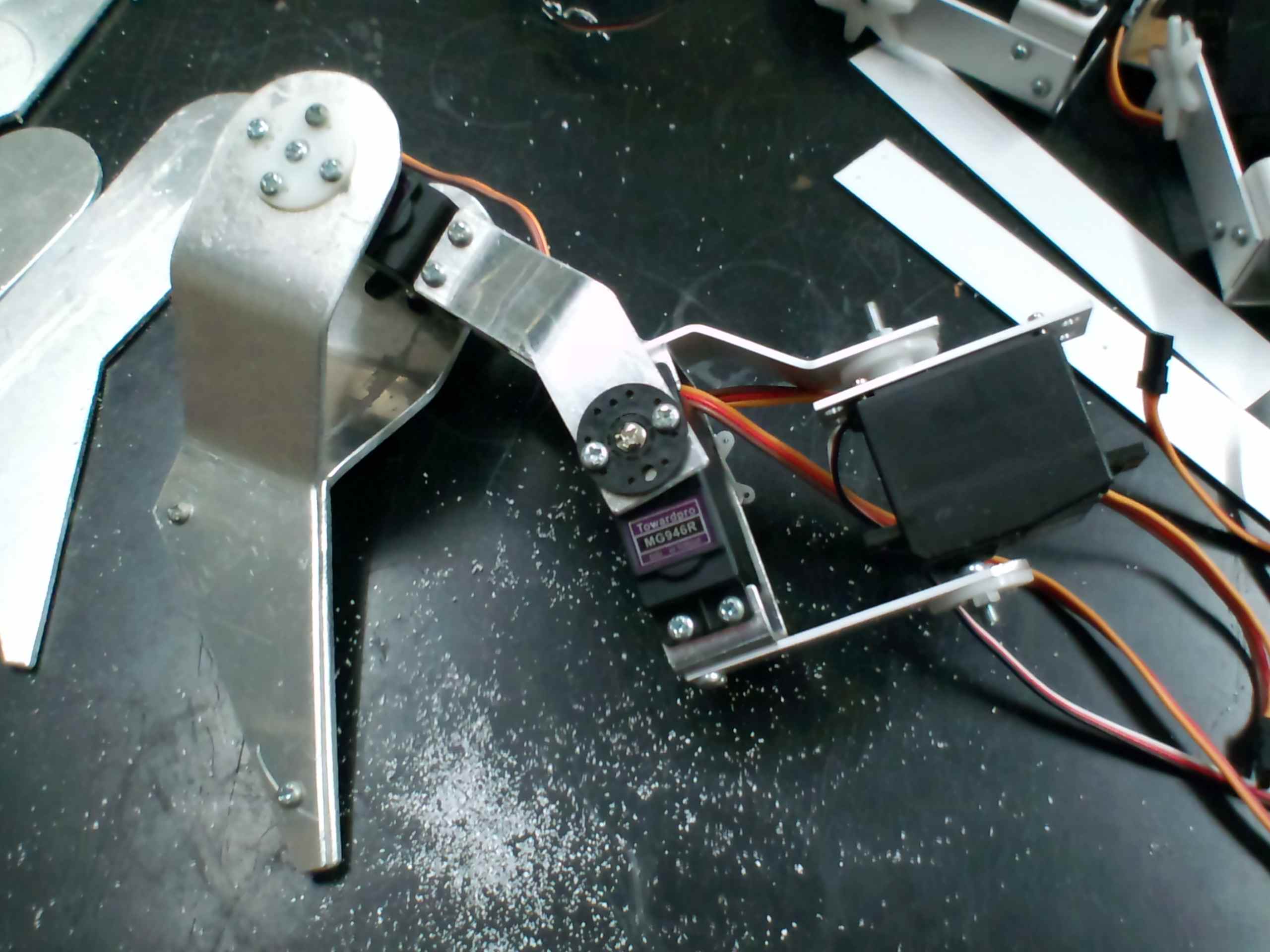
| 足を1本組んだ時の画像です。3mm厚のアルミ板のおかげで結構な重厚感です。 |
 |
| ブラケットや第1関節のパーツが揃ったので、4本の足を組み上げていっています。 |
 |
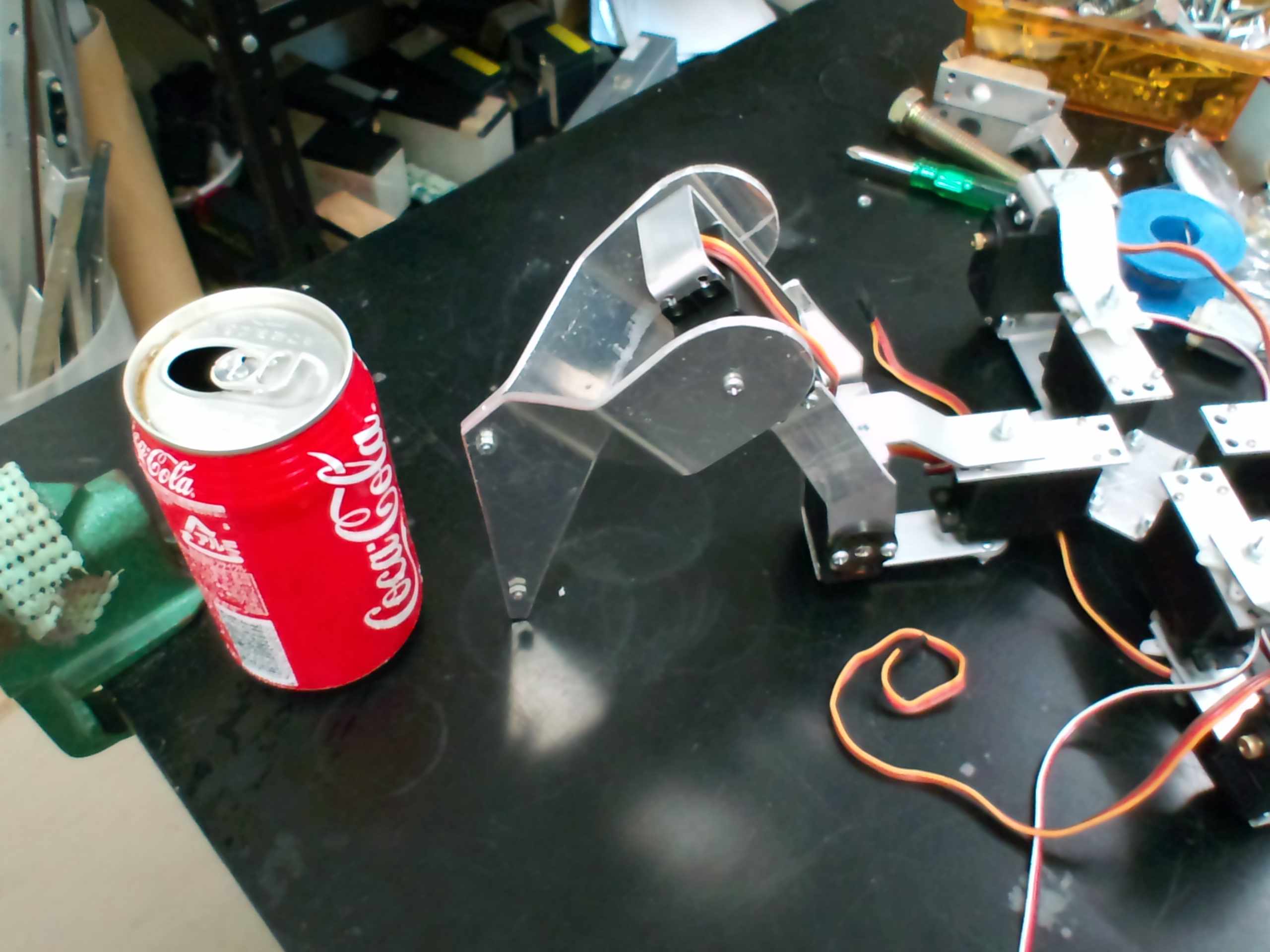
| 足の大きさ比較 |
 |
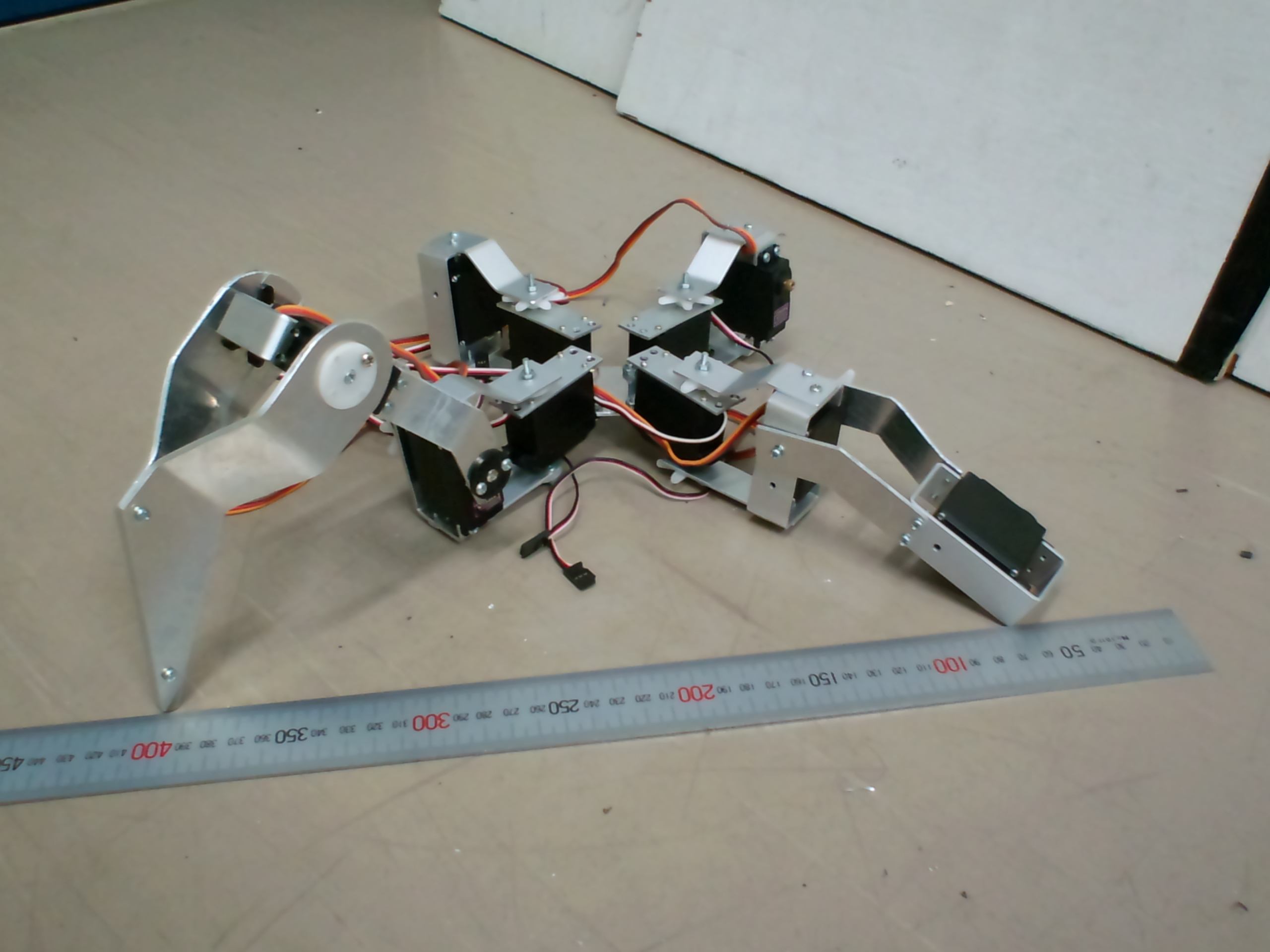
| 2本目の組み上げ開始。物差しを置いたのでどのくらいのサイズか分かっていただけるかと。。。 |
 |
| 写真の取り忘れでいきなり完成。ここでの完成は授業のプレゼンに間に合わせた完成で、完全には出来あがってません。ちなみに創造実習Ⅱでこのロボットのプレゼンをしましたwこのときは前進の歩行パターンしか出来てません。 |
 |
| いままではブラケットを使ってサーボの裏の軸を再現していましたが、軽量化と高剛性化のためにサーボ自体を両軸化することにしました。RB995、RB1051ホーンとボトムケースセット10個組みとブラケット、マウント、ボトムケース、ホーン付きRB995サーボセットを購入しました。 |
 |
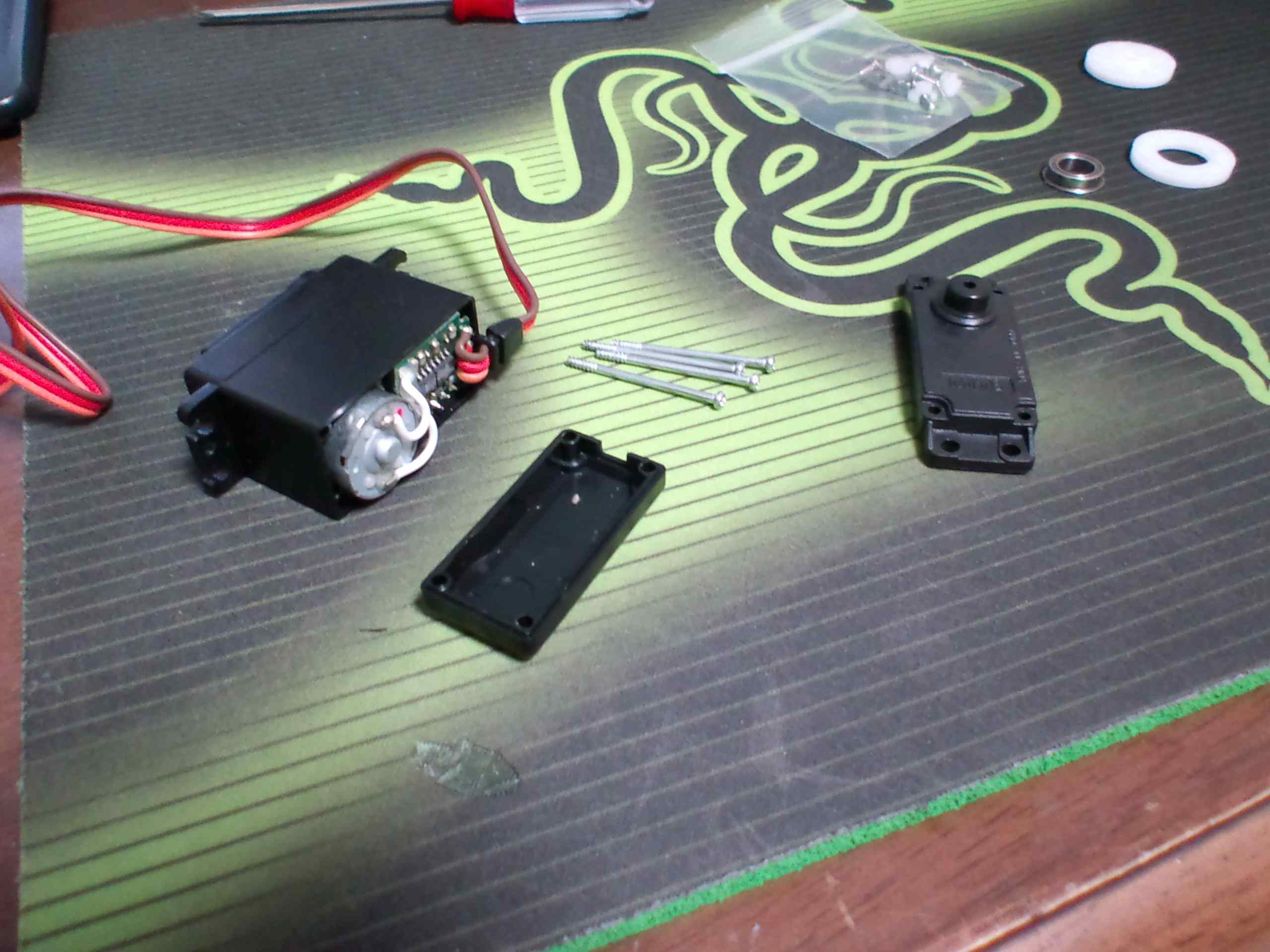
| まずはRB995の両軸化から。 |
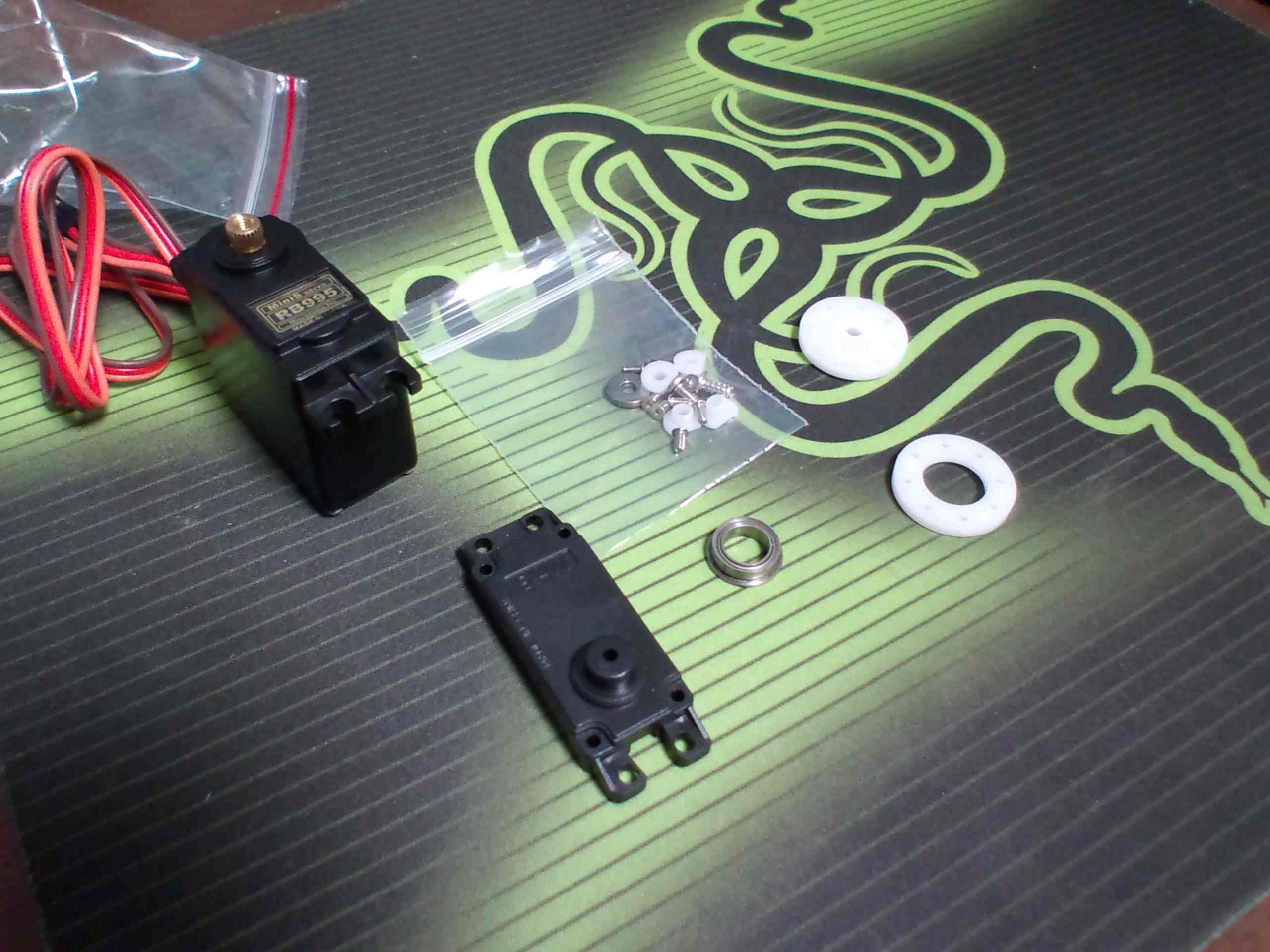 |
| 裏ぶたをはずすとこんな感じ。 |
 |
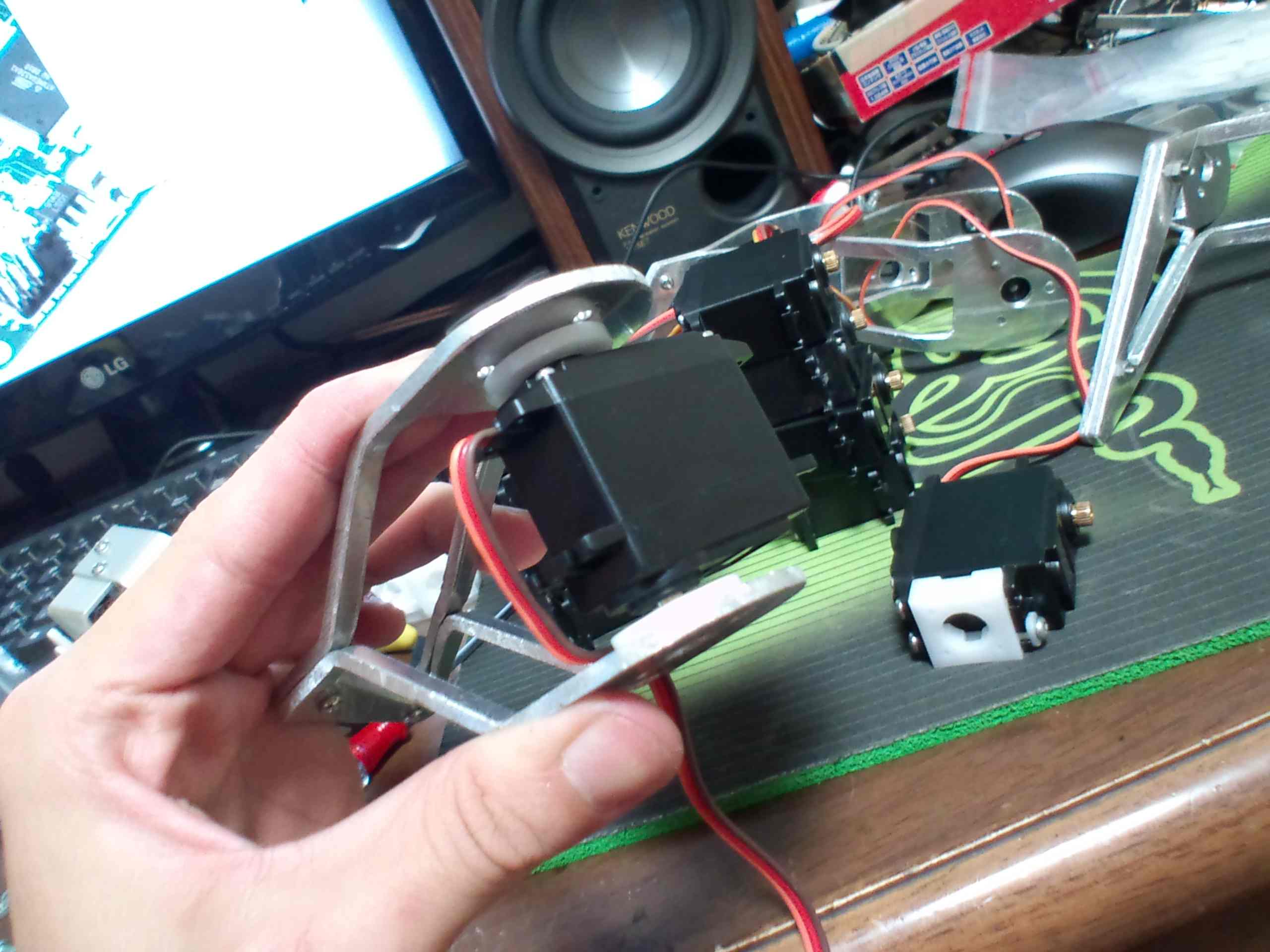
| サーボの側面についている結合具も購入しました。両軸化しただけでかなりテンションが上がりますw |
 |
| 両軸化のおかげでブラケットいらずになります。 |
 |