DCモータのPID制御
概要
DCモータに搭載されたインクリメンタル型エンコーダをAVRでサンプリングし、PID制御を用いてモータの回転位置を制御する実験です。各ゲインを変えることでPID制御の特性を確認できます。
PID制御について
制御量は以下のように求めました。
mv_right = kp * (e0 - e1) + ki * e0 + kd * ((e0- e1)-(e1 - e2));
kp:比例ゲイン ki:積分ゲイン kd:微分ゲイン
e0:現在の位置 e1:1つ前の位置 e2:2つ前の位置
使用した物
マイコン:ATmega88P
モータ:TG-47C(ツカサ電工)
エンコーダ:モータ付属のインクリメンタル型エンコーダ
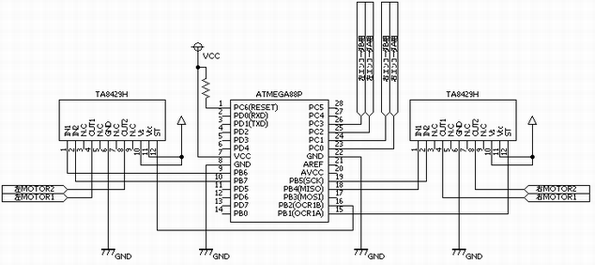
回路図
動作の様子
ソースコード